


Hardware components | ||||||
 |
| × | 1 | |||
| × | 1 | ||||
Hand tools and fabrication machines | ||||||
 |
| |||||
This project started as a high school project, where my son was looking for a simple graduation project and I wanted to help him with some basic programming.
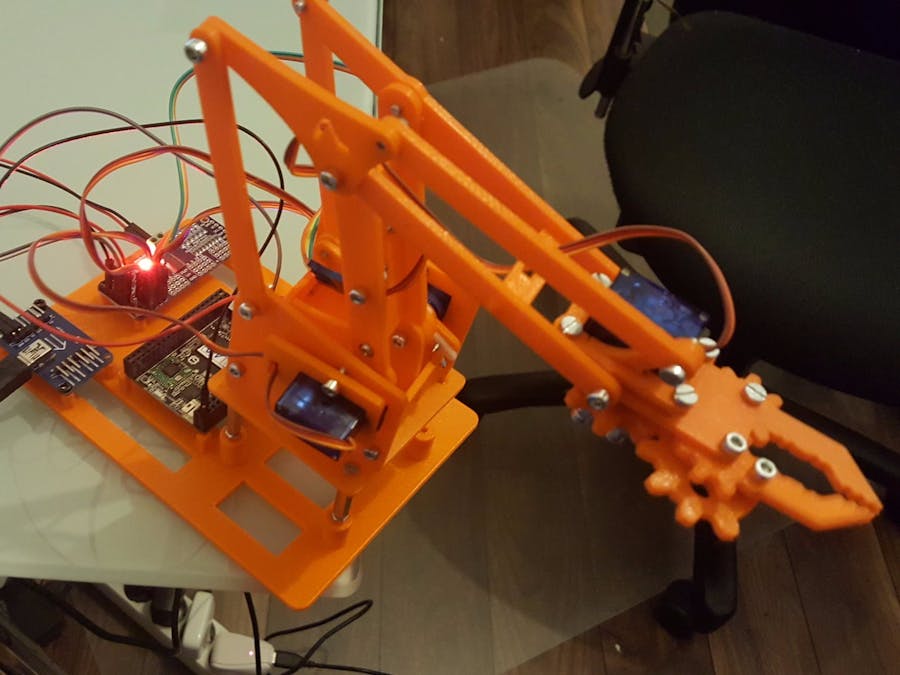
I just finished building my own 3D printer, and building this robotic arm with my kid was an excellent way of calibrating the printer, as it contains more than 30 small parts (51 meters filament)! The idea started with the robot arm that Ben Gray (phenoptix) created and so kindly shared on Thingiverse here. The parts are pretty robust with only two vertical and 3 horizontal shells. Filling for the bigger parts was set to 20%, whereas the smaller parts had 25% filling. I also slightly increased the extrusion multiplier, as my first printed parts showed small gaps around the screw holes.
CostsTo keep the cost to a minimum we decided to leave out an electronic interface an go for a simple webpage to control the arm. The CHIP is a (really cheap!) computer that does an excellent job of both controlling the servo driver and being a web server at the same time. I think total cost for all electronics is ~$15, and another ~$4 for the filament.
This is my first application that I wrote in Python, so be gentle with me ;-) Since the servos are still rotating at a speed which I think is too high for this arm, I had to build a thread for each servo to have them rotate in smaller steps, with a small delay between each step.



Comments